本演示展示了 FRDM-A-S32K312 开发板上的转向角度控制系统。应用程序从电位器读取模拟输入以模拟方向盘位置,并将其转换为相应的伺服电机角度。通过调整电位器,用户可以观察实时转向运动,演示如何获取、处理驱动输入并将其转换为执行器控制。该系统突出了 ADC 信号采集、信号缩放和基于 PWM 的伺服控制等关键概念,这些概念常用于电子助力转向和线控转向汽车应用中。
开发板:FRDM-A-S32K312
分类:传感器
外设:I2C、PWM、ADC
工具链:S32 Design Studio IDE
目录
- 1. 软件和工具
- 2. 硬件
- 3. 设置
- 4. 结果
- 5. 支持
- 6. 发行说明
1. 软件和工具
本示例使用 FRDM 汽车级 S32K3 捆绑包进行开发。要下载和安装完整的软件和工具生态系统,请使用以下链接:
S32K3 FRDM 汽车级开发板安装包
2. 硬件
2.1 所需硬件
- 个人电脑
- 12V 电源
- Type-C USB 数据线
| 开发板 | 图片 |
|---|---|
| FRDM-A-S32K312 | 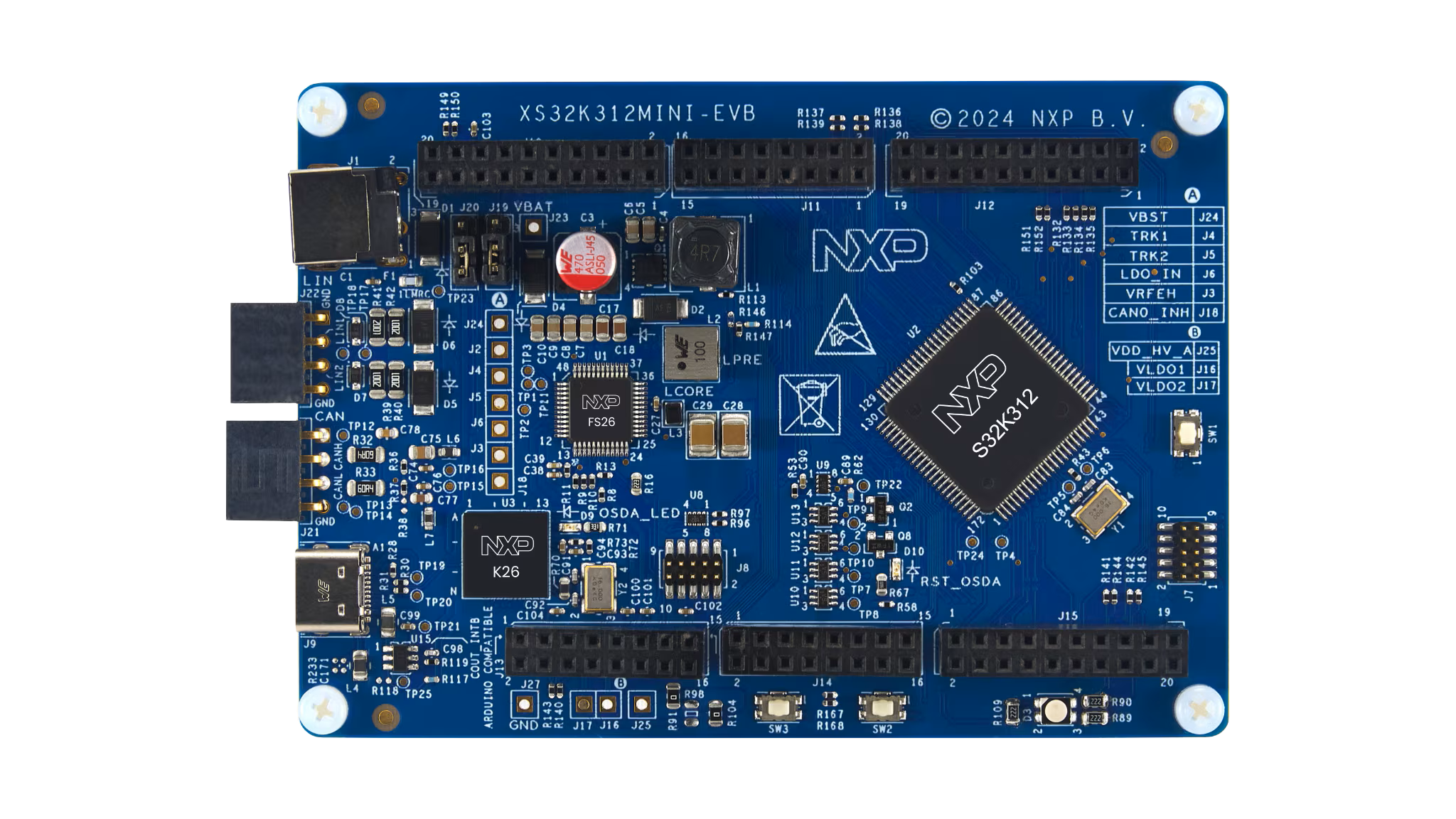 |
| FRDM K64 click 扩展板 | 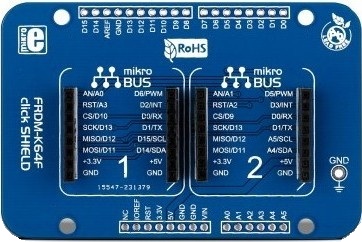 |
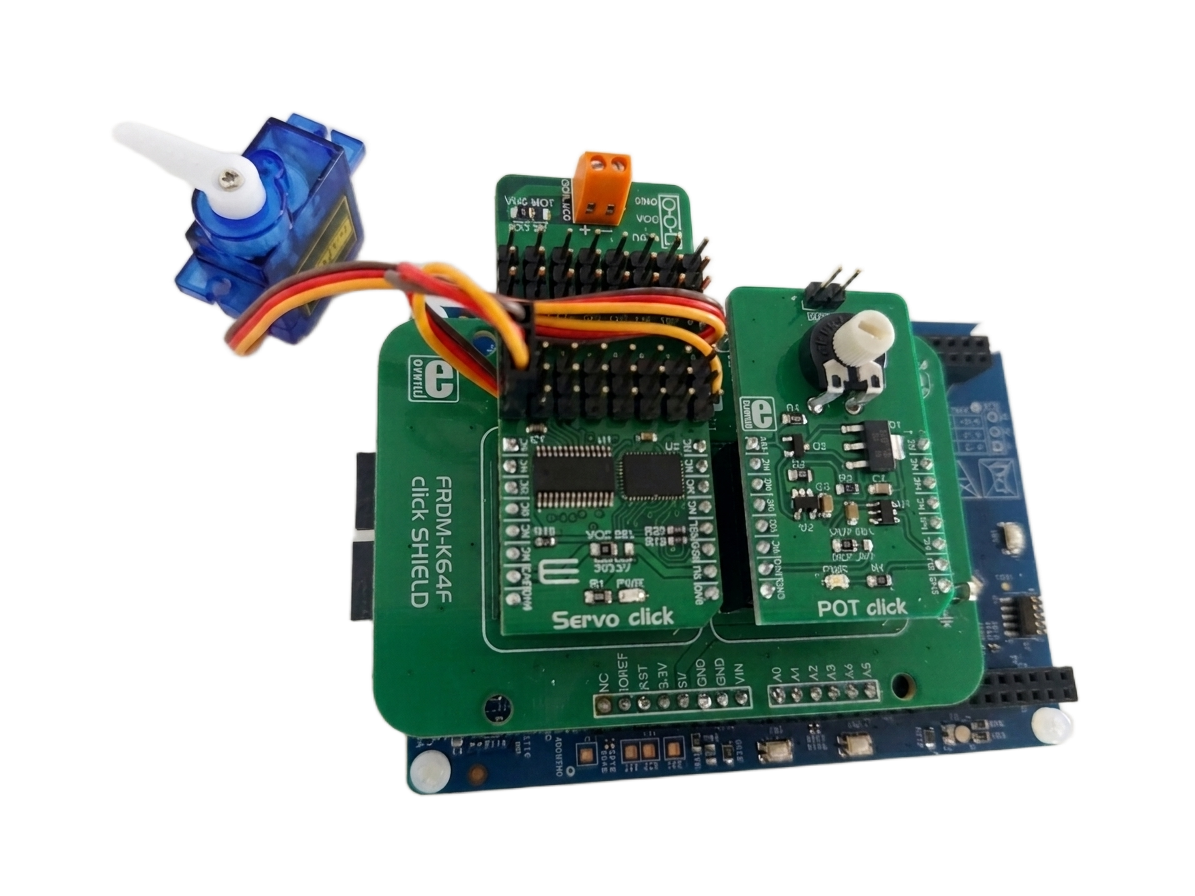
| Servo Click POT Click | 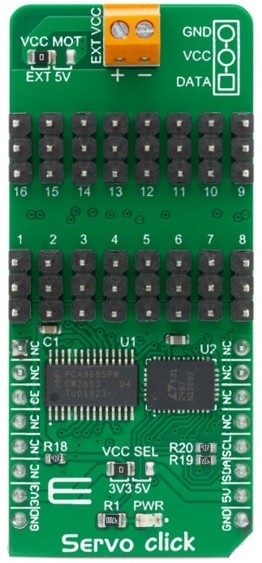  |
| 微型伺服电机 SG 180度 |  |
2.2 硬件连接
| FRDM-A-S32K312 | 排针引脚 | I/O | FRDM 扩展板 | Click 模块 | Click 引脚 | 描述 |
|---|---|---|---|---|---|---|
| PTB17 GPIO, 49 | J2 引脚 5 | → | D10 | Servo Click | OE | 输出使能 |
| PTC6 LPI2C1_SDA | J2 引脚 17 | → | SDA | Servo Click | SDA | I2C SDA 引脚 |
| PTC7 LPI2C1_SCL | J2 引脚 19 | → | SCL | Servo Click | SCL | I2C SCL 引脚 |
| P5V0 电源 5V | JA3 引脚 11 | → | 5V 电源 | Servo Click | 5V | VCC MOT 将 0ohm 移至 5V |
| PTD0 ADC0_P1 | J4 引脚 3 | ← | A1 | POT Click | AN | 模拟输出 |
| GND | JA3 引脚 11 | → | GND | POT Click | GND | 接地 |
| VDD_PERH | JA3 引脚 7 | → | 3.3V | POT Click | 3V3 | 3.3V 电源 |
注意: Servo Click 电机有两种供电方式:
- 外部电源(默认):将外部 5V 电源连接到 Servo Click 的 VCC MOT 端子 — 无需硬件修改。
- 板载电源:将 Servo Click 板上的 VCC MOT 0Ω 电阻从 EXT 位置移动到 5V 位置。这允许伺服电机直接从 FRDM-A-S32K312 开发板的 5V 电源轨供电,无需外部电源。
- 外部电源(默认):将外部 5V 电源连接到 Servo Click 的 VCC MOT 端子 — 无需硬件修改。
- 板载电源:将 Servo Click 板上的 VCC MOT 0Ω 电阻从 EXT 位置移动到 5V 位置。这允许伺服电机直接从 FRDM-A-S32K312 开发板的 5V 电源轨供电,无需外部电源。
伺服电机连接到 Servo Click 的通道 1,如下表:
| Servo Click | 伺服电机 |
|---|---|
| GND | 棕色线 |
| VCC | 红色线 |
| PWM | 橙色线 |
2.3 调试器连接
- 通过 12V 电源连接器将 12V 直流电源连接到开发板。
- 将 Type-C USB 数据线连接到电脑和 FRDM-A-S32K312 开发板以供电和调试
3. 设置
3.1 将项目导入 S32 Design Studio IDE
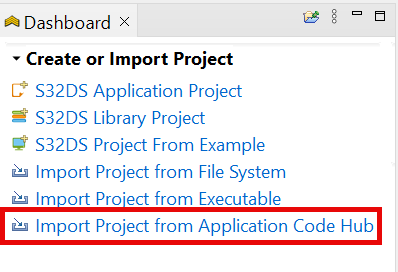
- 打开 S32 Design Studio IDE,在 Dashboard 面板中,选择从应用代码中心导入项目。
- 您可以通过直接搜索名称找到所需的演示项目。打开项目,从此窗口点击GitHub 链接,S32 Design Studio IDE 将自动获取项目属性,然后点击下一步>。

- 选择main分支,然后点击下一步>。
- 在目标->目录窗口中选择项目的本地路径。S32 Design Studio IDE 将把代码仓库克隆到此路径,点击下一步>。
- 选择导入现有 Eclipse 项目然后点击下一步>。
- 选择此仓库中的项目(此仓库中只有一个项目)然后点击完成。
3.2 生成、构建和运行示例
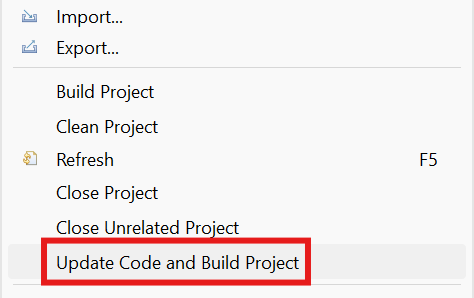
- 在项目资源管理器中,右键点击项目并选择更新代码并构建项目。这将生成配置(引脚、时钟、外设),更新源代码并使用活动配置(例如 Debug_FLASH)构建项目。确保构建成功完成并且 *.elf 文件无错误生成。在SDK 组件管理弹出窗口中按是继续。
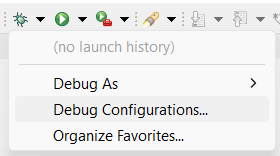
- 进入调试并选择调试配置。将会有一个此项目的调试配置:
配置名称 描述 $(example)_debug_flash_pemicro 使用 PEmicro 探头调试 FLASH 配置
选择所需的调试配置并点击调试。现在视图将切换到调试视图。使用控件来控制程序流程。
4. 结果
伺服电机实时跟随电位器位置,模拟转向控制系统。启动时,伺服居中到其中立位置。当用户旋转电位器时,ADC 读取模拟输入并将其映射到相应的 PWM 占空比,使伺服平滑地跟踪电位器角度。这演示了基本的线控转向概念,其中驱动输入(电位器)被转换为执行器运动(伺服)。